Para este estudio del ruido hemos comenzado por evaluar el ruido base de la cámara (dark noise), es decir el ruido que se genera en ausencia de luz en el sensor. Para ello, he rodado con la tapa del sensor puesta y la cámara cubierta con tela negra unos segundos a cada valor ISO, partiendo de las sensibilidades base, 500 y 2.500. He abierto estos planos en Davinci Resolve con ACES y como es de esperar la imagen aparece completamente negra, para observar el ruido he procedido a subir la exposición y modificar el contraste de igual manera en todos los valores ISO, así puedo observar, por un lado el “tamaño” del ruido, por otro su “color” y por último su movimiento.
Los números por tanto que aquí mostramos son relativos y sirven para poner en relación los distintos valores ISO y sus diferencias.
He observado el ruido a dos temperaturas de color distintas 6500K y 3200K considerando que los canales azul y rojo se modifican en relación al verde para establecer una colorimetría correcta.

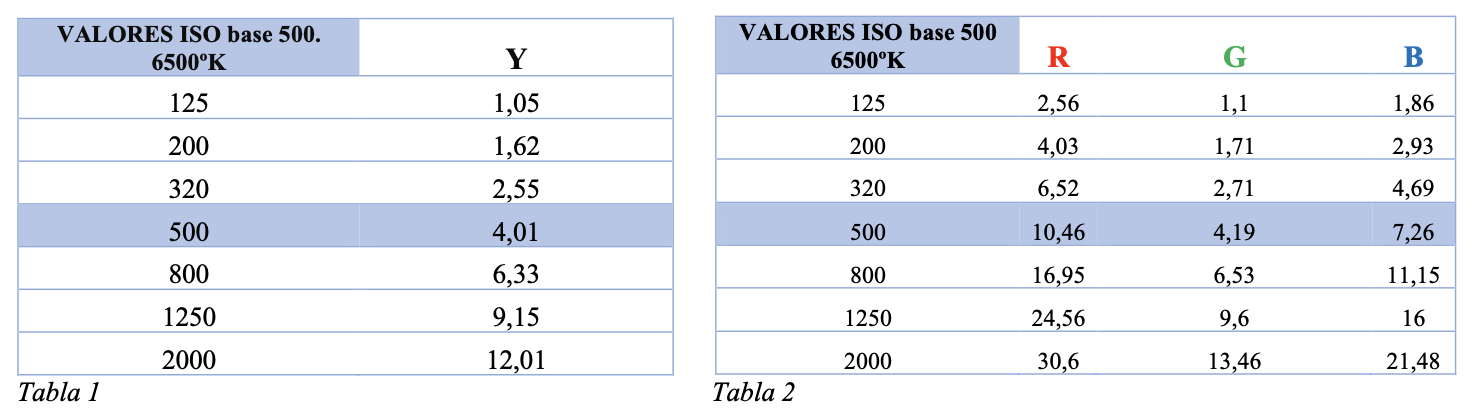
En los gráficos anteriores podemos ver la comparación del ruido base a diferentes valores ISO tomando como base EI 500 a 6.500 K, tanto en luminancia Y (figura 1) como en RGB (figura 2).
El eje horizontal muestra los valores ISO y el eje vertical muestra la desviación estándar (amplitud de variación de los valores de intensidad) medida en el histograma. Dada la variación aleatoria del brillo de los pixeles en función del valor ISO el histograma se muestra como una campana cuya base se va haciendo cada vez más grande a medida que aumentamos los valores de sensibilidad, esa variación en los valores de brillo es lo que muestra el eje vertical (Tabla 1 y 2 ).